








| 注:产品描述仅供参考,若因产品升级或其他原因造成与实物存在差异时,请以实物为准 |
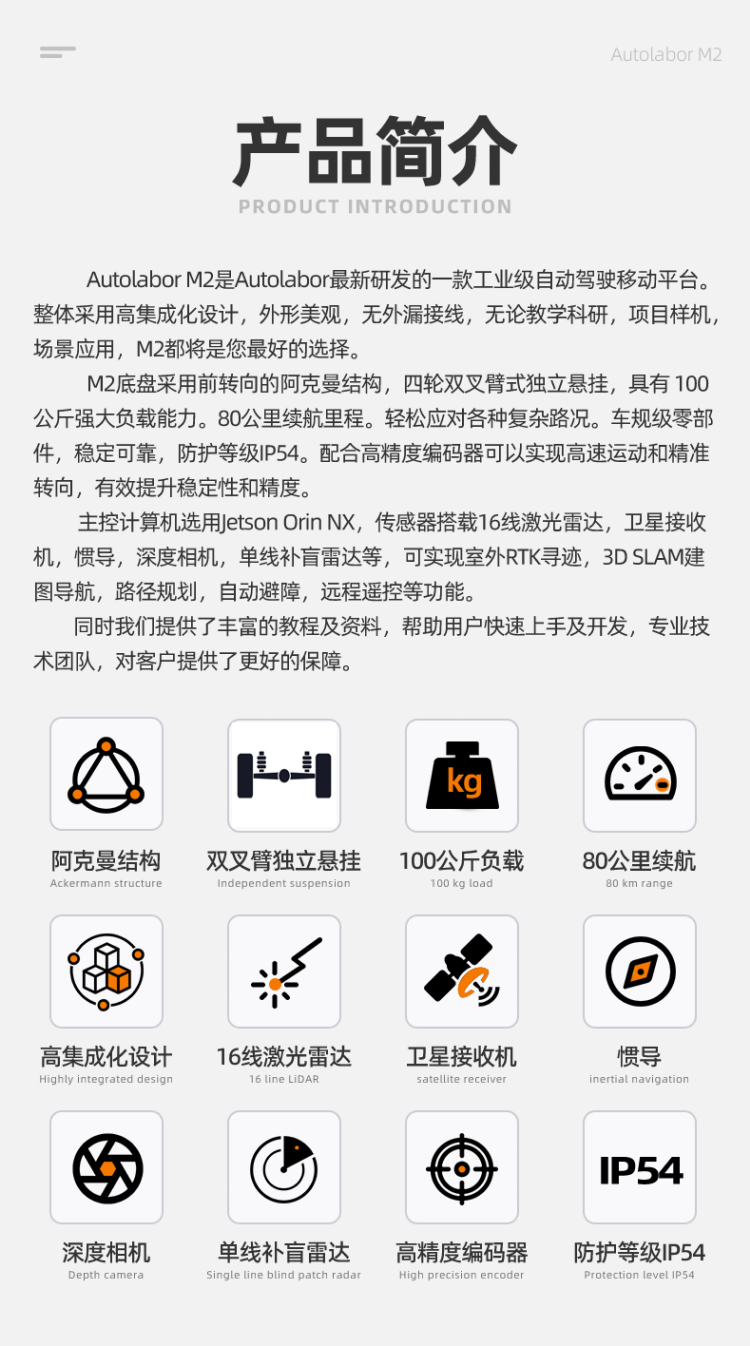
产品参数
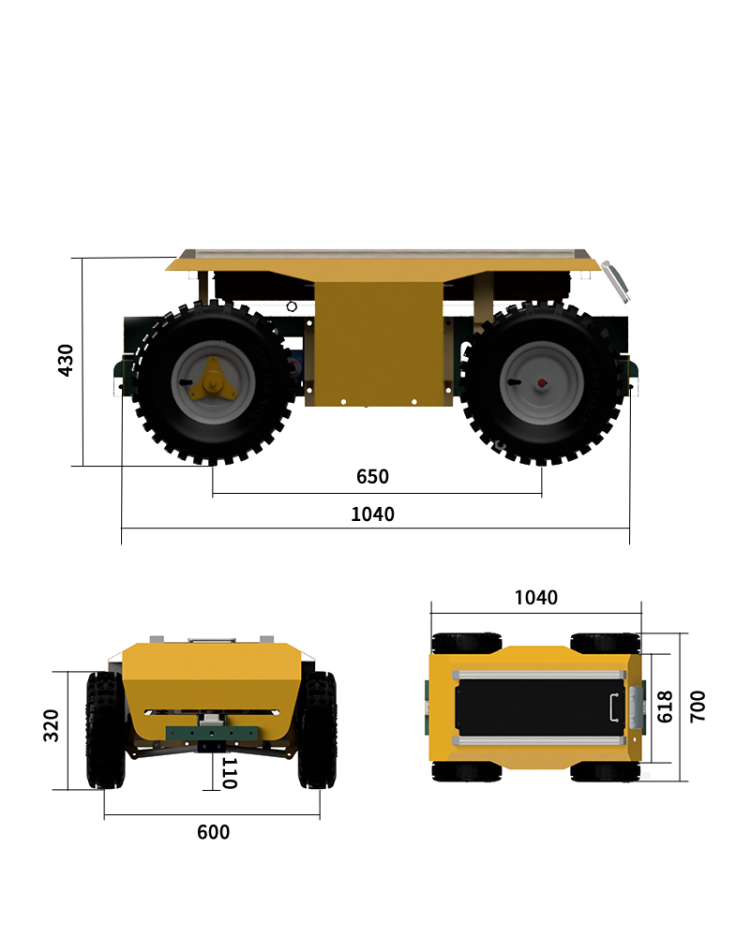
| 尺寸 | 1040*700*430mm |
|---|---|
| 轴距 | 650mm |
| 轮距 | 600mm |
| 最大速度 | 10km/h |
| 总质量 | 80kg |
| 最小转弯半径 | 1.2m |
| 最大爬坡度 | 30° |
| 离地高度 | 110mm |
| 驻车 | 电子驻车 |
| 驱动电机 | 500W |
| 转向电机 | 250W |
| 驱动形式 | 双轮独立驱动 |
|---|---|
| 转向形式 | 阿克曼转向 |
| 悬挂形式 | 四轮双叉臂式独立悬挂 |
| 电池参数 | 铅酸蓄电池 40AH 24V |
| 续航时间 | 8小时 |
| 续航里程 | 80公里 |
| 编码器 | 4096线 |
| 对外通信接口 | RS232 |
| 防护等级 | IP54 |
| 对外供电 | 24V |
| 遥控距离 | 50M |
产品参数
| 尺寸 | 1040*700*860mm |
|---|---|
| 最大速度 | 10km/h |
| 总质量 | 80kg |
| 最小转弯半径 | 1.2m |
| 最大爬坡度 | 30° |
| 离地高度 | 110mm |
| 驻车 | 电子驻车 |
| 驱动形式 | 双轮独立驱动 |
| 转向形式 | 阿克曼转向 |
| 悬挂形式 | 四轮双叉臂式独立悬挂 |
| 电池参数 | 铅酸蓄电池 40AH 24V |
| 续航时间 | 8小时 |
|---|---|
| 续航里程 | 80公里 |
| 编码器 | 4096线 |
| 防护等级 | IP54 |
| 遥控距离 | 50M |
| 上位机 | Jetson Orin NX |
| 多线激光雷达 | RS-Helios 16 |
| 前后补盲雷达 | LD19 |
| 深度相机 | Vzense DCAM710 |
| 惯导 | CH104M |
产品参数
| 尺寸 | 1040*700*860mm |
|---|---|
| 最大速度 | 10km/h |
| 总质量 | 80kg |
| 最小转弯半径 | 1.2m |
| 最大爬坡度 | 30° |
| 离地高度 | 110mm |
| 驻车 | 电子驻车 |
| 驱动形式 | 双轮独立驱动 |
| 转向形式 | 阿克曼转向 |
| 悬挂形式 | 四轮双叉臂式独立悬挂 |
| 电池参数 | 铅酸蓄电池 40AH 24V |
| 续航时间 | 8小时 |
|---|---|
| 续航里程 | 80公里 |
| 编码器 | 4096线 |
| 防护等级 | IP54 |
| 遥控距离 | 50M |
| 上位机 | Jetson Orin NX |
| 卫星接收机 | RTK580 |
| 前后补盲雷达 | LD19 |
| 深度相机 | Vzense DCAM710 |
3D+RTK版本参数
| 尺寸 | 1040*700*860mm |
|---|---|
| 最大速度 | 10km/h |
| 总质量 | 80kg |
| 最小转弯半径 | 1.2m |
| 最大爬坡度 | 30° |
| 离地高度 | 110mm |
| 驻车 | 电子驻车 |
| 驱动形式 | 双轮独立驱动 |
| 转向形式 | 阿克曼转向 |
| 悬挂形式 | 四轮双叉臂式独立悬挂 |
| 电池参数 | 铅酸蓄电池 40AH 24V |
| 续航时间 | 8小时 |
|---|---|
| 续航里程 | 80公里 |
| 编码器 | 4096线 |
| 防护等级 | IP54 |
| 遥控距离 | 50M |
| 上位机 | Jetson Orin NX |
| 卫星接收机 | RTK580 |
| 多线激光雷达 | RS-Helios 16 |
| 前后补盲雷达 | LD19 |
| 深度相机 | Vzense DCAM710 |
| 惯导 | CH104M |
