5.1 TF坐标变换
机器人系统上,有多个传感器,如激光雷达、摄像头等,有的传感器是可以感知机器人周边的物体方位(或者称之为:坐标,横向、纵向、高度的距离信息)的,以协助机器人定位障碍物,可以直接将物体相对该传感器的方位信息,等价于物体相对于机器人系统或机器人其它组件的方位信息吗?显示是不行的,这中间需要一个转换过程。更具体描述如下:
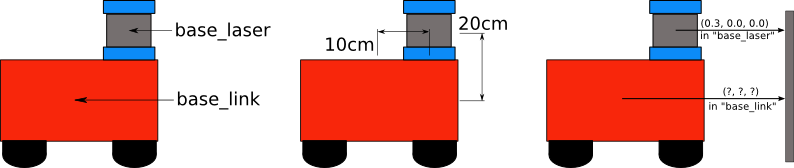
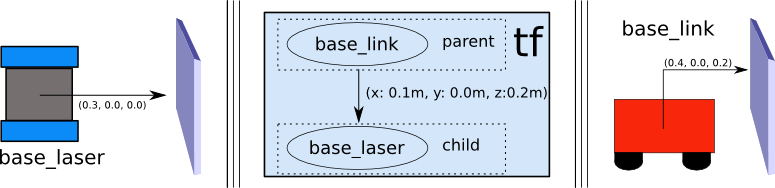
场景1:雷达与小车
现有一移动式机器人底盘,在底盘上安装了一雷达,雷达相对于底盘的偏移量已知,现雷达检测到一障碍物信息,获取到坐标分别为(x,y,z),该坐标是以雷达为参考系的,如何将这个坐标转换成以小车为参考系的坐标呢?
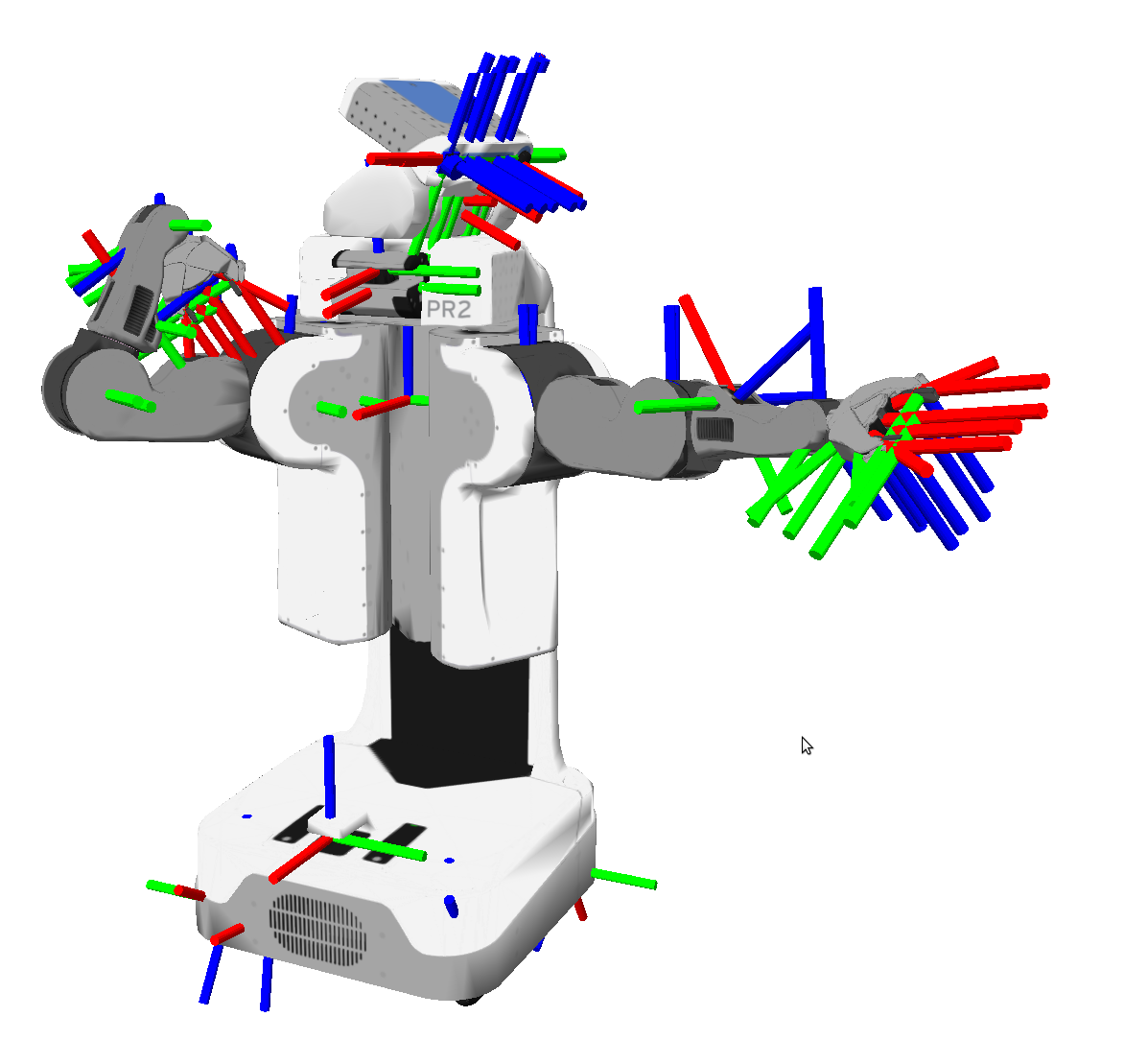
场景2:现有一带机械臂的机器人(比如:PR2)需要夹取目标物,当前机器人头部摄像头可以探测到目标物的坐标(x,y,z),不过该坐标是以摄像头为参考系的,而实际操作目标物的是机械臂的夹具,当前我们需要将该坐标转换成相对于机械臂夹具的坐标,这个过程如何实现?
当然,根据我们高中学习的知识,在明确了不同坐标系之间的的相对关系,就可以实现任何坐标点在不同坐标系之间的转换,但是该计算实现是较为常用的,且算法也有点复杂,因此在 ROS 中直接封装了相关的模块: 坐标变换(TF)。
概念
tf:TransForm Frame,坐标变换
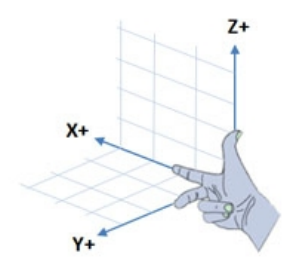
坐标系:ROS 中是通过坐标系统开标定物体的,确切的将是通过右手坐标系来标定的。
作用
在 ROS 中用于实现不同坐标系之间的点或向量的转换。
案例
小乌龟跟随案例:如本章引言部分演示。
说明
在ROS中坐标变换最初对应的是tf,不过在 hydro 版本开始, tf 被弃用,迁移到 tf2,后者更为简洁高效,tf2对应的常用功能包有:
tf2_geometry_msgs:可以将ROS消息转换成tf2消息。
tf2: 封装了坐标变换的常用消息。
tf2_ros:为tf2提供了roscpp和rospy绑定,封装了坐标变换常用的API。
另请参考: