8.3.5 电机调速01_PID控制理论
场景:
速度信息可以以m/s为单位,或者也可以转换成转速 r/s,而电机的转速是由PWM脉冲宽度来控制的,如何根据速度信息量化成合适的PWM值呢?
比如:现有一辆行驶中的无人车,要求将车速调整至100KM/h,那么应该如何向电机输出PWM值?或换言之,如何控制油门?
调速实现策略由多种,PID其中较为常用。
PID简介
PID算法是一种经典、简单、高效的动态速度调节方式,P代表比例,I代表积分,D代表微分。
PID公式如下:
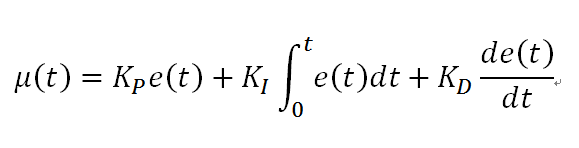
e(t)作为 PID 控制的输入;
u(t)作为 PID 控制器的输出和被控对象的输入;
Kp 控制器的比例系数;
Ki控制器的积分时间,也称积分系数;
Kd控制器的微分时间,也称微分系数。
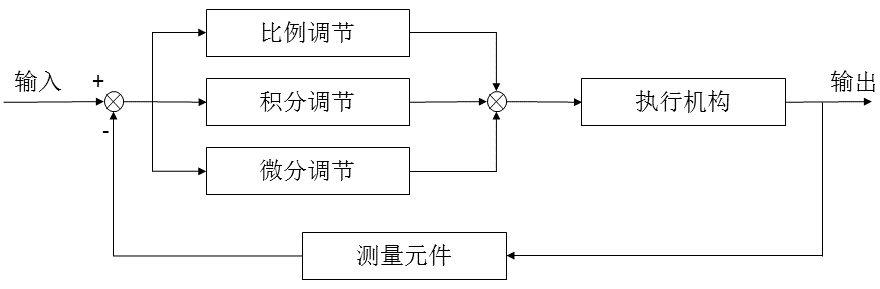
上述公式稍显晦涩,PID控制原理框架图更有助于理解:
1.P
如果实现上述场景中的车速控制,一种简单的实现方式是: 确定目标速度,获取当前速度,使用(目标速度-当前速度)*某一系数 计算结果为输出的PWM,再获取当前速度,使用(目标速度-当前速度)*某一系数 计算结果为输出的PWM并输出...如此循环在上述模型中,调速实现是一个闭环,每一次循环都会根据当前时速与目标时速的差值,再乘以以固定系数,计算出需要输出的PWM值,这其中的系数,称之为比例。
2.I
上述模型算法中,最终速度与预期速度存在稳态误差,这意味着最终结果可能永远无法达成预期,解决的方法就是使用积分I。每次调速时,输出的PWM还要累加根据积分I计算的结果,以消除静态误差。
3.D
当I值设置的过大时,可能会出先"超速"的情况,超速之后可能需要多次调整,产生系统震荡,解决这种情况可以使用D微分,当速度越是接近目标速度时,D就会越施加反方向力,减弱P的控制,起到类似”阻尼“的作用。通过D的使用可以减小系统震荡。
综上,PID闭环控制实现是结合了比例、积分和微分的一种控制机制,通过P可以以比例的方式计算输出,通过I可以消除稳态误差,通过D可以减小系统震荡,三者相结合,最终是要快速、精准且稳定的达成预期结果,而要实现该结果,还需要对这三个数值反复测试、调整...下一节将介绍在 Arduino 中PID控制的具体实现,其中就包括PID库的调用,以及PID调试的具体方式。