第 8 章 机器人平台设计
学习到当前阶段大家对ROS已经有一定的认知了,但是之前的内容更偏理论,尤其是介绍完第6章仿真与第7章导航之后,想必相当一部分同学有些疑惑:
实体机器人与仿真实现有什么区别?
ROS系统如何控制机器人底盘运动,并计算里程计数据呢?
实际的传感器如雷达、摄像头等应该怎么使用呢?
...
机器人系统是一套机电一体化的设备,机器人设计也是高度集成的系统性实现,为了给大家解答上述疑惑,方便机器人硬件的快速上手,本章去繁就简旨在从0到1的设计一款入门级、低成本、简单但又具备一定扩展性的两轮差速机器人,学习完本章内容之后,你甚至可以构建属于自己的机器人平台。
本章主要介绍内容如下:
机器人的组成部分;
Arduino 基本使用;
Arduino 与电机驱动;
底盘控制实现;
基于树莓派的ROS环境搭建;
激光雷达与相机的基本使用与集成。
本章学习目标如下:
- 能够独立搭建机器人平台。
注意:
该章内容会使用到ROS的分布式框架,树莓派端作为主机,PC端作为从机;
PC端使用的ROS版本为noetic,树莓派端使用的版本为melodic,因为树莓派需要与底盘交互,而相关功能包还未更新。
案例演示:
1.机器人底盘实现
底盘正面
Arduino 与 电机驱动板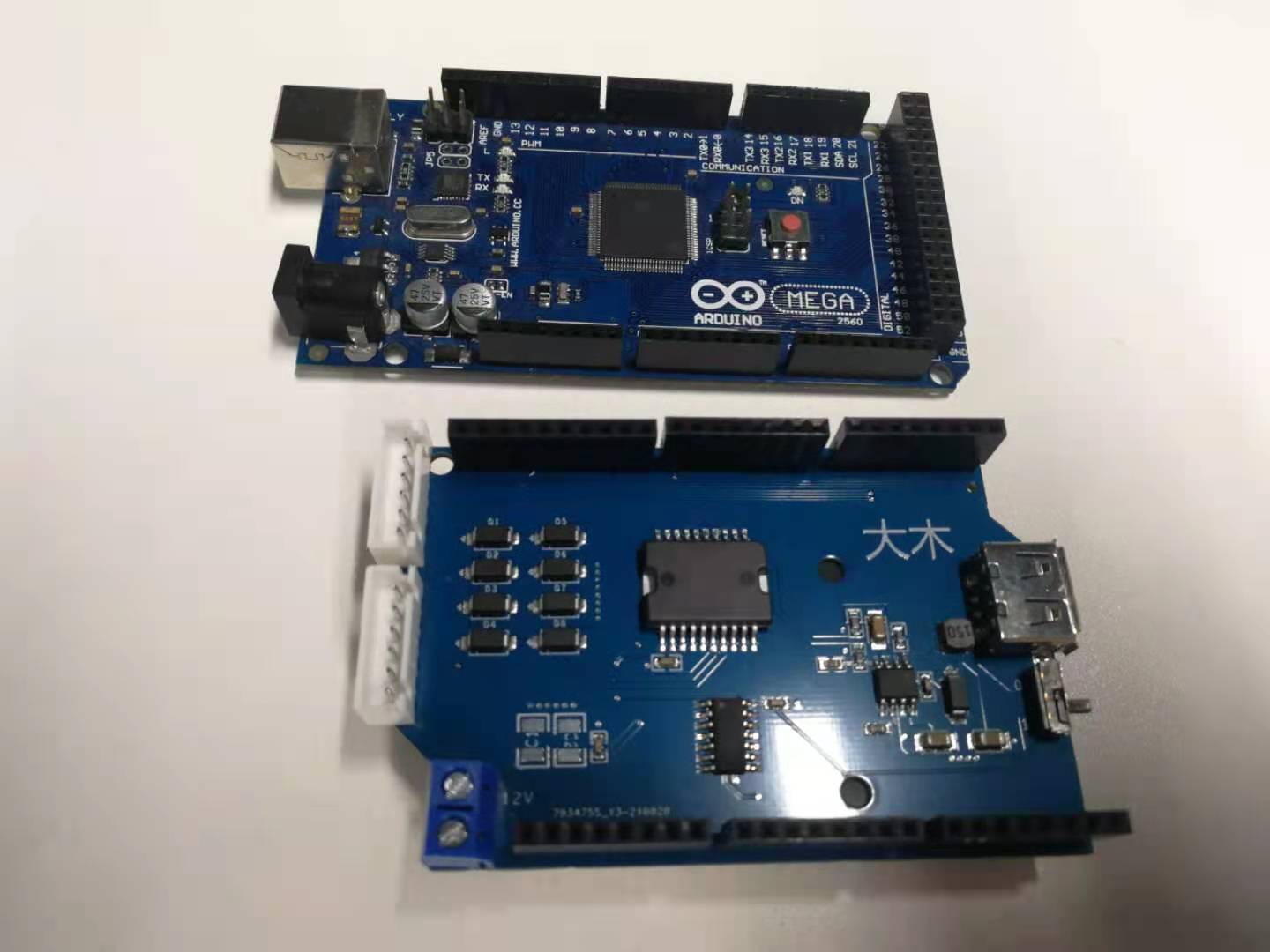
底盘背面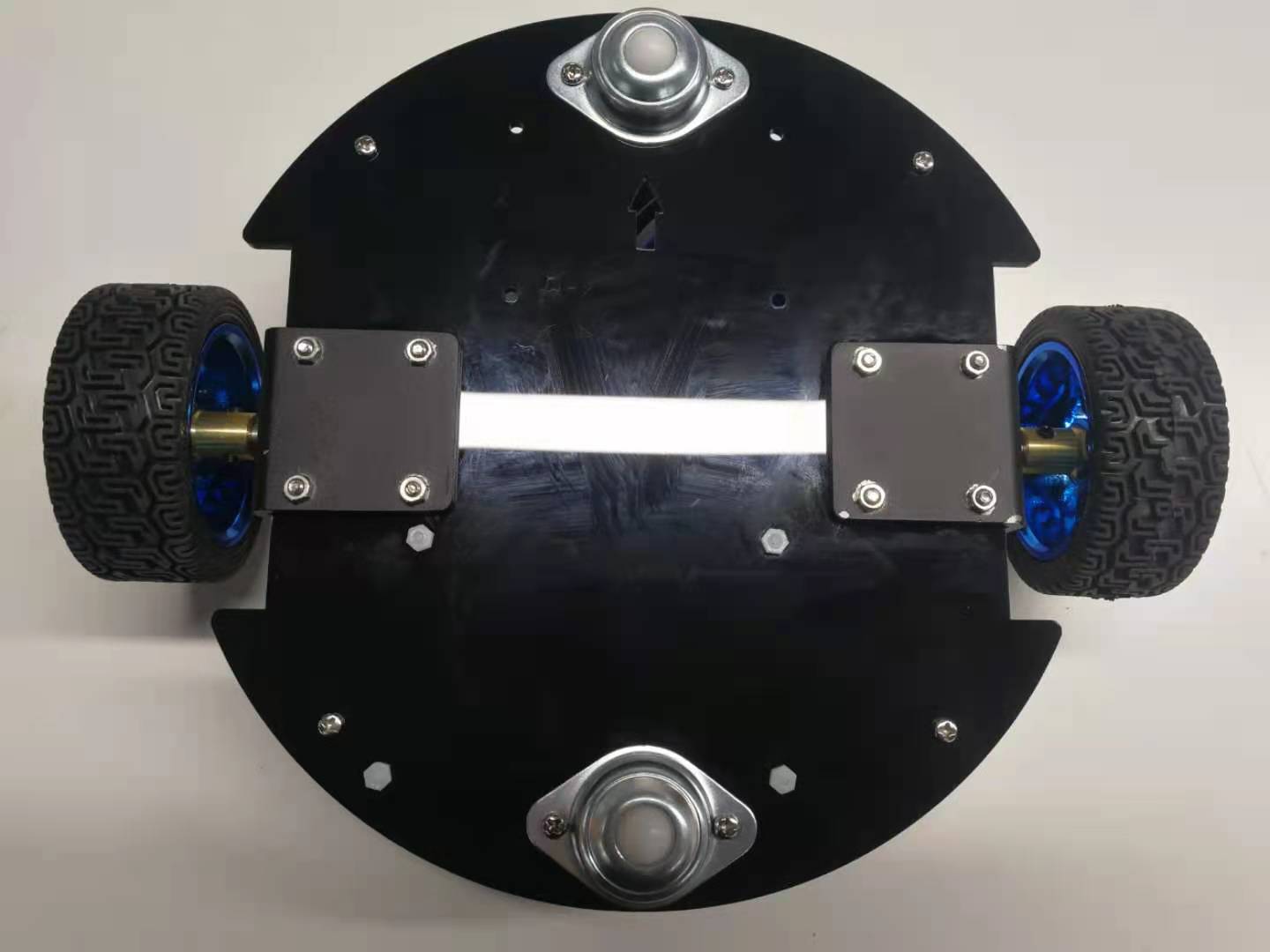
2.机器人控制系统以及传感器实现
3.机器人集成效果